腿部骨头结构图(腿骨头构造)
PAGE PAGE 11999年,瑞士的HOCOMA医疗机构研制出了LOKOMAT康复机器人。该机器人通过刺激患者的下肢肌肉,达到康复治疗的效果,是一款利用跑步机配合辅助进行康复的驱动式步态矫正机器人,如图1.1所示。利用电机驱动膝关节与髋关节的运动,通过力矩传感器和功放器协调运动。为了确保生理步态的一致性,将自主调节装置与独特的体重支持系统进行结合来实现。膝关节与髋关节的尺寸可以在训练中自行调节,以满足不同体型患者的需求。并且该机器人还设有虚拟现实模块,以提高患者在康复训练时的兴趣2009年,日本筑波大学研发出了可穿戴式外骨骼助力机器人,以帮助因脑外伤等疾病引起的瘫痪和因年龄的增长导致肌肉力量下降的人群,如图1.2所示。该机器人共有两个控制系统,分别为生物信息系统和自主控制系统,当穿戴者想要活动时,生物信息系统可以对其身体上的电流进行监控,此时机器人关节处的传感器会检测到这些沿着肌纤维流动的EMG信号,并传递给控制器,进而驱动机器人手臂或腿部机构。还有一个是自主控制系统,使机器人的臀骨宽度、腿部长度以及手臂长度都可自由调节以适应穿戴者的不同体型,从而使外骨骼康复机器人与患者的行为姿态更加适配在国内,也有很多科研机构和高校对外骨骼技术进行了研究,并且制造出了多种不同功能的人体下肢外骨骼康复机器人。
外骨骼技术的研究在初期阶段主要是一些研究力较强的高校在进行,随后也有一些医疗企业和军工企业逐渐加入了此项技术的研究2014年,成都电子科技大学机器人研究中心通过实践,自主研发出了一种助力行走的下肢外骨骼康复机器人, 如图1.3所示。此项设计采用了机电一体化系统,利用传感器对人体下肢的运动意识进行感知和收集,并将收集到的信息传递到控制模块当中,进而通过这些信息来驱动康复机器人按照穿戴者所需要的运动方式进行工作,这款下肢外骨骼康复机器人经过不断地实验和改进,整体的结构设计和控制系统都趋于完善北京瑞德医疗有限公司,推出了一款名为Rewalk的康复机器人,如图1.4所示。该机器人的电池和计算机控制系统均采用了背包式设计,可遥控操作,这项设计拥有独立的支撑结构,大大减轻了穿戴者对系统重量的感知,还具有功能传感系统和智能学习技术,不仅可以供穿戴者站立、行走,甚至可以进行爬楼梯拿动。使用场所不受环境限制,拥有多个电动机提供助力,考虑人机适配和舒适性对外骨骼的腰部杆件及绑带进行设计,可以完美实现机器和患者肢体动作的协调性和一致性从人体解剖学方面来看,骨骼、关节以及肌肉是人体的主要组成部分。其中骨骼起到了支撑的作用,即为人体的支架;骨骼的运动则有附着在其上面的骨骼肌带动,进行收缩舒张的动作,此时在肌肉的带动下骨骼便可绕着各自的关节旋转并进行相应的运动。
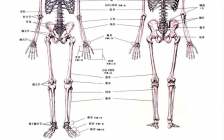
下肢在人体正常行走这一动作过程中起着主要作用,而人体下肢可分为大腿、小腿和足部,下肢的关节则包括髋关节、膝关节和踝关节,这也是设计康复机器人自由度的主要部分。人体下肢骨是由盆带骨和游离骨组成,其中盆带骨是指髋骨;游离下肢骨则包括腿部的股骨、胫骨和腓骨,以及足部的跗骨和趾骨,图2.1为人体下肢骨骼结构示意图通常人体下肢的运动都是平地运动,这也是人体下肢运动最基本的运动形式,





文章评论(0)